- Kabel verwendet
- Überprüfungsanweisungen
- Oszillographie von K-CAN, PT-CAN, F-CAN
- Widerstandsmessreihenfolge mit passenden Widerständen K-CAN, PT-CAN und F-CAN
- K-CAN
- PT-CAN, F-CAN
- Hinweis!
- CAN-Bus funktioniert nicht
In diesem Handbuch wird überprüft, ob das High-Level-Signal des CAN und das Low-Level-Signal des CAN korrekt an die Busverbindung übertragen werden.
Kabel verwendet
Multifunktionskabel
Überprüfungsanweisungen
- Spannungsprüfung (Oszilloskop): Zur Spannungsprüfung muss die Batterie angeschlossen und die Zündung eingeschaltet sein.
- Widerstandsmessung: Bei der Widerstandsmessung muss das zu messende Objekt vor der Messung spannungsfrei geschaltet werden. Dazu wird die Batterie abgeklemmt. Warten Sie 3 Minuten, bis sich alle Kondensatoren im System entladen haben.
CAN-Informationen
Der CAN-Bus (Controller Area Network) ist ein serielles Bussystem mit folgenden Merkmalen:
- Die Signalausbreitung erfolgt in beide Richtungen.
- Jede Nachricht wird von allen Busteilnehmern empfangen. Jeder Busteilnehmer entscheidet, ob er die Nachricht nutzt,
- Zusätzliche Busteilnehmer werden durch einfache Parallelschaltung hinzugefügt.
- Das Bussystem bildet mit einem Fahrer ein System. Jeder Busteilnehmer kann ein Fahrer oder ein Aktor sein, je nachdem, ob er als Sender oder Empfänger angeschlossen ist.
- Als Übertragungsmedium wird eine Zweidrahtverbindung verwendet. Kabelbezeichnungen: CAN low und CAN high.
- Jeder Busteilnehmer kann in der Regel mit allen anderen Busteilnehmern über den Bus kommunizieren. Der Datenaustausch auf dem Bus unterliegt den Zugangsregeln. Der Hauptunterschied zwischen dem K-CAN-Datenbus (Body-CAN-Bus), dem PT-CAN-Bus (Motor- und Übertragungs-CAN-Bus) und dem F-CAN-Bus (Chassis-CAN-Bus) ist:
- K-CAN: Datenübertragungsrate ca. 100 Kbps Einzeldraht möglich.
- PT-CAN: Datenübertragungsrate ca. 500 Kbps Single Wire Mode ist nicht möglich.
- F-CAN: Datenübertragungsrate ca. 500 Kbps Single Wire Mode ist nicht möglich.
Fahrer: Der Fahrer ist ein aktiver Kommunikationspartner, von dem die Kommunikationsinitiative ausgeht. Der Fahrer hat Vorrang und kontrolliert die Kommunikation. Er kann über das Bussystem Nachrichten an den passiven Busteilnehmer (Aktor) senden und auf Anfrage seine Nachrichten empfangen.
Aktor: Der Aktor ist ein passives Kommunikationselement. Es empfängt einen Befehl zum Empfangen und Senden von Daten.
System mit Master-Gerät: In einem System mit Master-Gerät können Kommunikationsteilnehmer zu einem bestimmten Zeitpunkt die Rolle des Masters oder Aktors übernehmen.
Oszillographie von K-CAN, PT-CAN, F-CAN
Für mehr Klarheit, ob der CAN-Bus einwandfrei funktioniert, müssen Sie die Buskommunikation beobachten. Gleichzeitig müssen keine einzelnen Bits analysiert werden und Sie müssen nur sicherstellen, dass der CAN-Bus funktioniert. Die Oszillographie zeigt: „Der CAN-Bus funktioniert offensichtlich störungsfrei“.
Bei der Messung mit einem Spannungsoszilloskop empfangen ein CAN-Kabel (oder High-CAN-High) mit niedrigem Pegel und Masse ein Rechtecksignal innerhalb des Spannungsbereichs:
K-CAN:
Niedriger CAN-Pegel im Verhältnis zur Masse: U min = 1 V und U max = 5 V
Hoher CAN-Pegel im Verhältnis zur Masse: U min = 0 V und U max = 4 V
Diese Werte sind ungefähr und können je nach Buslast um bis zu 100 mV variieren.
Oszilloskop-Einstellungen für die Messung am K-CAN:
CH1: Sonde 1, Rang 2 B / div; DC DC2-Anschluss: Sonde 2, Grad 2 V / Div; DC-Verbindungszeit: 50 ms / div

Abb. 1: K-CAN-Messung: CH1 niedriger CAN-Pegel, CH2 hoher CAN-Pegel
Bei der Messung mit einem Spannungsoszilloskop empfangen ein CAN-Kabel (oder High-CAN-High) mit niedrigem Pegel und Masse ein Rechtecksignal innerhalb des Spannungsbereichs:
PT-CAN und F-CAN
Niedriger CAN-Pegel im Verhältnis zur Masse: U min = 1,5 V und U max = 2,5 V
Hoher CAN-Pegel im Verhältnis zur Masse: U min = 2,5 V und U max = 3,5 V
Diese Werte sind ungefähr und können je nach Buslast um bis zu 100 mV variieren.
Oszilloskopeinstellungen für die PT-CAN- (oder F-CAN-) Messung:
CH1: Sonde 1, Rang 1 B / div; DC DC2-Anschluss: Sonde 2, Grad 1 V / Div; DC-Verbindungszeit: 10 ms / div 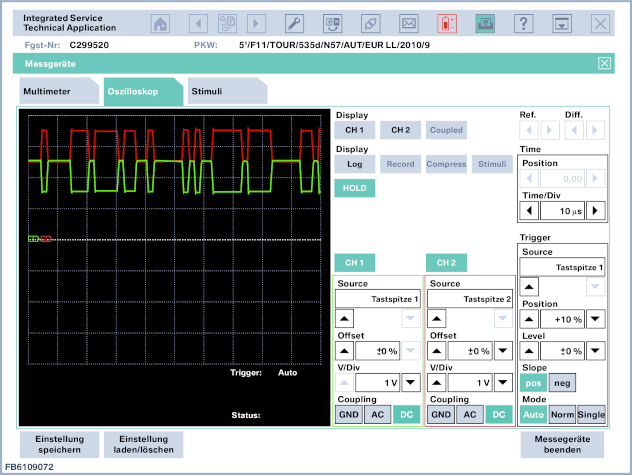
Abbildung 2: PT-CAN-Messung: CH1 Low CAN, CH2 High CAN
Widerstandsmessreihenfolge mit passenden Widerständen K-CAN, PT-CAN und F-CAN
Der Prozess der Überprüfung der Widerstandsmessung:
- CAN-Bus muss spannungsfrei sein
- Es dürfen keine anderen Messgeräte angeschlossen werden (Parallelschaltung von Messgeräten)
- Die Messung erfolgt zwischen CAN-Low-Level- und CAN-High-Level-Drähten.
- Die tatsächlichen Werte können um einige Ohm von den angegebenen Werten abweichen.
K-CAN
Eine separate Widerstandsmessung am K-CAN-Bus ist nicht möglich, da der Widerstand je nach Schaltlogik des Rechners variiert!
PT-CAN, F-CAN
Um die Reflexion des Signals zu verhindern, werden zwei CAN-Bus-Teilnehmer (mit der maximalen Entfernung im PT-CAN-Netzwerk) mit einem Widerstand von 120 Ohm belastet. Beide Lastwiderstände sind parallel geschaltet und bilden einen Ersatzwiderstand von 60 Ohm. Bei abgeschalteter Versorgungsspannung kann dieser Ersatzwiderstand zwischen den Datenleitungen gemessen werden. Darüber hinaus können einzelne Widerstände einzeln gemessen werden.
Messanleitung mit einem Widerstand von 60 Ohm: Trennen Sie einen leicht zugänglichen Computer vom Reifen. Messen Sie den Widerstand am Stecker zwischen dem niedrigen und dem hohen CAN-Kabel.
Hinweis!
Nicht alle Fahrzeuge haben einen Abschlusswiderstand am CAN-Bus. Das Vorhandensein des eingebauten Abschlusswiderstands am angeschlossenen Fahrzeug kann anhand des entsprechenden Schaltplans überprüft werden.
CAN-Bus funktioniert nicht
Wenn der K-CAN- oder PT-CAN-Datenbus nicht funktioniert, liegt möglicherweise ein Kurzschluss oder ein unterbrochener High- oder Low-CAN-Draht vor. Oder defektes Steuergerät.
Um die Fehlerursache zu lokalisieren, wird empfohlen, wie folgt vorzugehen:
- Trennen Sie die CAN-Bus-Teilnehmer der Reihe nach, bis ein Baustein gefunden wird, der die Störung verursacht (= ECU X).
- Überprüfen Sie die Kabel zu Computer X auf Kurzschluss oder Unterbrechung.
- Überprüfen Sie nach Möglichkeit die ECU X.
- Eine solche Abfolge von Aktionen führt nur dann zum Erfolg, wenn der Kurzschluss eine überprüfbare Leitung vom Computer zum CAN-Bus aufweist. Wenn die Leitung im CAN-Bus selbst einen Kurzschluss aufweist, müssen Sie den Kabelbaum prüfen.
Druckfehler, semantische Fehler und technische Änderungen behalten wir uns vor.



